# Gavin Morrison & Modestas Jakuska - Image processing Project
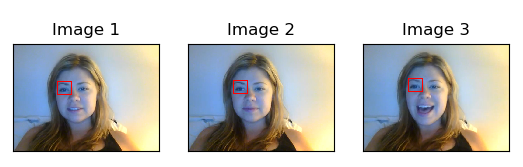
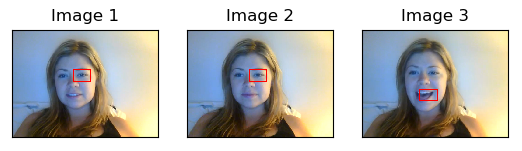
# Project objective: Find the left eye in the first image and track it through the image sequence.
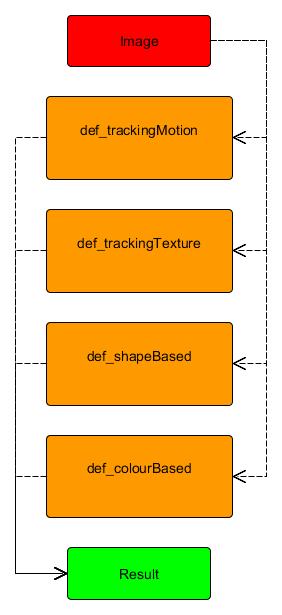
# Methods used:
# 1. Template Matching.
# 2. Camshift
# 3. Gabor Filter
# 4. Colour Isolation
# Template Matching:
# Author: Gavin Morrison
# How it works: The object required within the image is found
# by comparing a smilar image.
# 1. Import image to be treated
# 2. Imported image converted to Grayscale
# 3. Import template image
# 4. Store width and height coordinates of template
# 5. OpenCV has a number of methods for template matching, I have chosen two which I have put into a list
# 6. Loop to implement the method
# 7. Perform match operation
# 8. Draw a rectangle around the matched area
# 9. Display the results
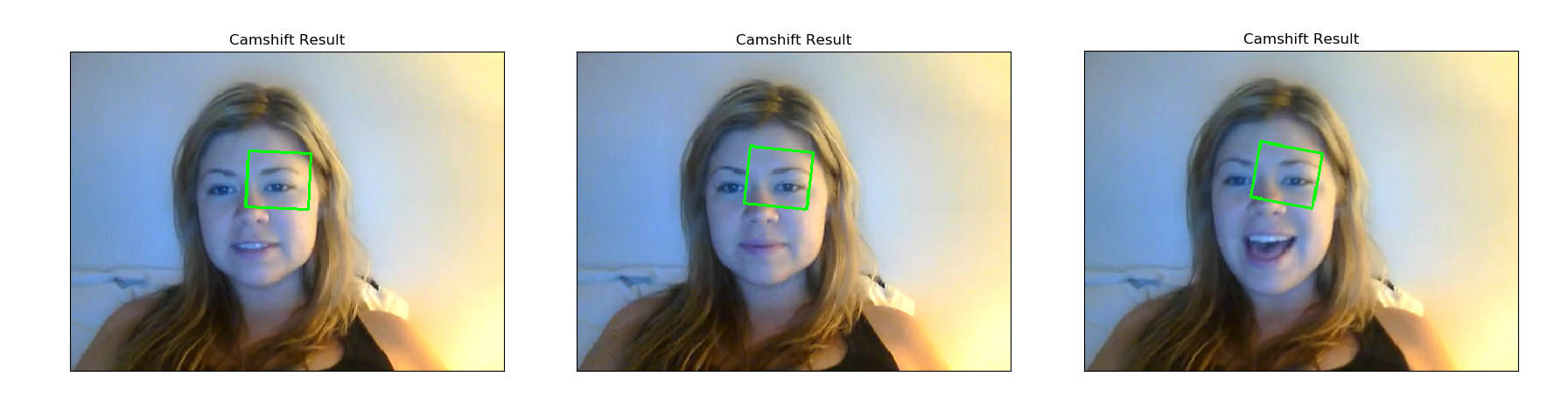
# Camshift:
# Author: Gavin Morrison
# How it works: Detects the density of a set of points provided by a back projection within the image being tracked, while checkig ize and rotation.
# 1. Import image to be treated
# 2. Copy of image to isolate region of interest
# 3. Coordinates of region of interest [row:row, column:column]
# 4. The region of interest is converted to HSV colour space
# 5. Create histogram of region of interest, using hue. The hue range is from 0 to 179.
# 6. Original image is converted to HSV colour space
# 7. Back projection used to create mask from the hue of the region of interest histogram.
# 8. Filter applied in an attempt to reduce noise in the mask (later addition)
# 9. The coordinates of our region of interest are assigned to variables.
# 10. Define criteria
# 11. Rectangle of tracking area is created using camshift function
# 12. These are the points for the rectangle
# 13. cv2.polylines used instead of 'cv2.rectangle' to accommodate rotation of bound space.
# 14. Display the processed image
# Gabor Filter:
# Author: Modestas Jakuska
# 1. Import image to be treated
# 2. Convert image to RGB
# 3. Convert image to Grayscale
# 4. Get 90 and 0 degree Gabor Images
# 5. Create a mask
# 6. Simplify image
# 7. Display the processed image
# Colour Isolation:
# Author: Modestas Jakuska
# Title: Skin Segmentation using YCrCb color range
# How it works:
# Convert image to YCbCr.
# Go through the image array and turn non-skin pixels black.
# Skin pixels are determined by their Cr and Cb values.
# 1. Select image
# 2. Convert BGR to RGB and then to YCrCb
# 3. Skin values taken from this paper:
# "Comparative Study of Skin Color Detection and Segmentation in HSV and YCbCr Color Space" by Khamar Basha Shaika, Ganesan P, V.Kalist, B.S.Sathish , J.Merlin Mary Jenitha
# They suggest using this range:
# 150 < Cr < 200 and 100 < Cb < 15
# 4. Create skinRegion, a binary image containing the skin region
# 5. Then superimpose the skin region onto the original image
# so that we can see the skin region with colour
# 7. Display the processed image
import sys
import numpy as np
import cv2
from matplotlib import pyplot as plt
import easygui
# Menu code written by Gavin Morrison D12124782
def main_menu():
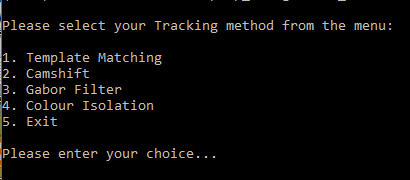
print("\nPlease select your Tracking method from the menu:\n")
print("1. Template Matching")
print("2. Camshift")
print("3. Gabor Filter")
print("4. Colour Isolation")
print("5. Exit")
while True:
try:
selection=int(input("\nPlease enter your choice... "))
if selection==1:
template_matching()
break
elif selection==2:
camshift()
break
elif selection==3:
gabor_filter()
break
elif selection==4:
colour_isolation()
break
elif selection==5:
break
else:
print("\nInvalid choice. Please enter 1-5")
main_menu()
except:
print("\nInvalid choice. Please enter 1-5")
exit
def template_matching():
# Code written by Gavin Morrison D12124782
# Opening an image using a File Open dialog:
# f = easygui.fileopenbox()
# I = cv2.imread(f)
# Import image to be treated
original_image = cv2.imread("Ilovecats3.bmp")
# Imported image converted to Grayscale
original_image_grayscale = cv2.cvtColor(original_image, cv2.COLOR_BGR2GRAY)
# Import template image
left_eye_template = cv2.imread("leftEye.bmp", 0)
# Store width and height coordinates of template
width, height = left_eye_template.shape[::-1]
# OpenCV has a number of methods for template matching, I have chosen two which I have put into a list
templateMatchingMethods = ['cv2.TM_CCORR_NORMED', 'cv2.TM_CCOEFF_NORMED']
# Loop to implement the method
for method in templateMatchingMethods:
methods = eval(method)
# Perform match operation
result_1 = cv2.matchTemplate(original_image_grayscale, left_eye_template, methods)
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(result_1)
top_left_1 = max_loc
bottom_right_1 = (top_left_1[0] + width, top_left_1[1] + height)
# Draw a rectangle around the matched area
cv2.rectangle(original_image, top_left_1, bottom_right_1, (0,0,255), 2)
# Display the results
finished_image = cv2.cvtColor(original_image, cv2.COLOR_BGR2RGB)
plt.subplot(111),plt.imshow(finished_image,cmap = 'gray'), plt.title('Template Matching Result'), plt.xticks([]), plt.yticks([])
plt.show()
raw_input("Please press enter to return to Main Menu")
main_menu()
def camshift():
# Code written by Gavin Morrison D12124782
# Opening an image using a File Open dialog:
# f = easygui.fileopenbox()
# I = cv2.imread(f)
# Import image to be treated
original_image = cv2.imread("Ilovecats1.bmp")
# Copy of image to isolate region of interest
tracking_image = cv2.imread("Ilovecats1Copy.bmp")
# Coordinates of region of interest [row:row, column:column]
region_of_interest = tracking_image[125: 160, 210: 250]
# Coordinates for right eye
# region_of_interest = tracking_image[125: 175, 145: 200]
# The region of interest is converted to HSV colour space
HSV_region_of_interest = cv2.cvtColor(region_of_interest, cv2.COLOR_BGR2HSV)
#Create histogram of region of interest, using hue. The hue range is from 0 to 179.
region_of_interest_histogram = cv2.calcHist([HSV_region_of_interest], [0], None, [180], [0, 180])
#Original image is converted to HSV colour space
original_image_HSV = cv2.cvtColor(original_image, cv2.COLOR_BGR2HSV)
# Back projection used to create mask from the hue of the region of interest histogram
mask = cv2.calcBackProject([original_image_HSV], [0], region_of_interest_histogram, [0, 180], 1)
# Filter applied in an attempt to reduce noise in the mask (later addition)
filter_kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (3, 3))
mask = cv2.filter2D(mask, -1, filter_kernel)
_, mask = cv2.threshold(mask, 10, 255, cv2.THRESH_BINARY)
# The coordinates of our region of interest are assigned to variables
row = 210
column = 125
width = 250 - row
height = 160 - column
# Coordinates for right eye
# row = 145
# column = 125
# width = 200 - row
# height = 175 - column
# define criteria
criteria = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10,1)
#rectangle of tracking area is created using camshift function
rectangle, tracking_area = cv2.CamShift(mask, (row, column, width, height), criteria)
#These are the points for the rectangle
points = cv2.boxPoints(rectangle)
points = np.int0(points)
# cv2.polylines used instead of 'cv2.rectangle' to accommodate rotation of bound space.
cv2.polylines(original_image, [points], True, (0, 255, 0), 2)
# Display our processed image
finished_image = cv2.cvtColor(original_image, cv2.COLOR_BGR2RGB)
plt.subplot(111),plt.imshow(finished_image,cmap = 'gray'), plt.title('Camshift'), plt.xticks([]), plt.yticks([])
plt.show()
raw_input("Please press enter to return to Main Menu")
main_menu()
def gabor_filter():
# Sorting def. taken (and modified) from Geeks for Geeks
# URL: https://www.geeksforgeeks.org/python-sort-list-according-second-element-sublist/
def Sort(sub_li):
circlesList.sort(key = lambda x: x[0])
return sub_li
input_image = cv2.imread("test.bmp")
rgb = cv2.cvtColor(input_image, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(input_image, cv2.COLOR_BGR2GRAY)
height, width, colourChannes = input_image.shape
# Get 90 and 0 degree Gabor Images
g_kernel_90 = cv2.getGaborKernel((30, 30), 4.0, np.pi/2, 10.0, 0.5, 0, ktype=cv2.CV_32F)
g_image_90 = cv2.filter2D(gray, cv2.CV_8UC3, g_kernel_90)
# Create a mask
kernel = np.ones((10,10),np.uint8)
mask = cv2.bitwise_not(g_image_90)
mask = cv2.dilate(mask, kernel, iterations = 1) # Dilate to include eyes
cropped = cv2.bitwise_and(gray,gray,mask = mask)
# Simplify image
cropped[cropped < 100] = 0
cropped[cropped > 100] = 255
circles = cv2.HoughCircles(cropped, cv2.HOUGH_GRADIENT,1,20,
param1=10, param2=10, minRadius=0, maxRadius=10)
circles = np.uint16(np.around(circles))
circlesList = list(circles[0])
bestGuess = Sort(circlesList)[0] # Get leftmost circle
cv2.circle(rgb,(bestGuess[0], bestGuess[1]),bestGuess[2]+20,(500),2)
plt.subplot(111)
plt.imshow(rgb)
plt.title("Output Image")
plt.show()
raw_input("Please press enter to return to Main Menu")
main_menu()
def colour_isolation():
# Author: Modestas Jakuska
# Title: Skin Segmentation using YCrCb color range
# How it works:
# Convert image to YCbCr.
# Go through the image array and turn non-skin pixels black.
# Skin pixels are determined by their Cr and Cb values.
# Select image
f = easygui.fileopenbox()
I = cv2.imread(f)
# Convert BGR to RGB and then to YCrCb
I = cv2.cvtColor(I, cv2.COLOR_BGR2RGB)
YCC = cv2.cvtColor(I, cv2.COLOR_RGB2YCR_CB)
# Skin values taken from this paper:
# "Comparative Study of Skin Color Detection and Segmentation in HSV and YCbCr Color Space" by Khamar Basha Shaika, Ganesan P, V.Kalist, B.S.Sathish , J.Merlin Mary Jenitha
# They suggest using this range:
# 150 < Cr < 200 and 100 < Cb < 15
min_val = np.array([0,150,100],np.uint8)
max_val = np.array([255,200,150],np.uint8)
# Create skinRegion, a binary image containing the skin region
# Then superimpose the skin region onto the original image
# so that we can see the skin region with colour
skinRegion = cv2.inRange(YCC,min_val,max_val)
skinRegion = cv2.bitwise_and(I, I, mask = skinRegion)
plt.subplot(121)
plt.imshow(I)
plt.title("Input Image")
plt.subplot(122)
plt.imshow(skinRegion)
plt.title("Skin Region")
plt.show()
raw_input("Please press enter to return to Main Menu")
main_menu()
main_menu()





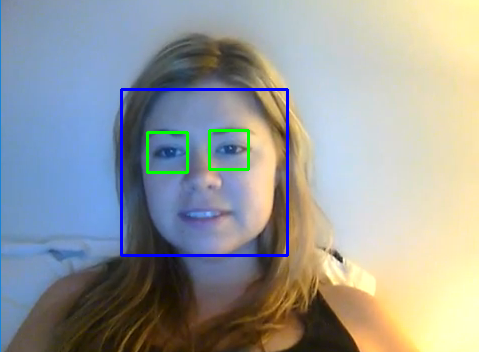 OpenCV has it’s own trainer and detector which can be used to train your own classifier, which in our case would need to track the left eye of a person over a series of three images.
OpenCV has it’s own trainer and detector which can be used to train your own classifier, which in our case would need to track the left eye of a person over a series of three images.